
- ���_(t��i)���_��ԇ�(y��n)��F(xi��n)��(ch��ng)���b..
- �����G����������f(shu��)����
- �͜�ԇ�(y��n)�九(ji��)�ܷ���
- ��(ji��n)�������ܹ̑B(t��i)�^����Ĺ���..
- �W(xu��)��(x��)�˽�̑B(t��i)�^������A(ch��)֪�R(sh��)
- �|ݸ�����W(xu��)Ժُ(g��u)�I��˾(����..
- ���T�x����ӿƼ�ӆُ(g��u)������..
- �ӟ����ļӟ��ٶ�����ʲô��..
- �v�����h(hu��n)��ԇ�(y��n)�O(sh��)��֮�}�Fԇ..
- ���շ�����ʲô��늄�(d��ng)�C(j��)����..

һ��ϵ�y(t��ng)늚�ԭ��D
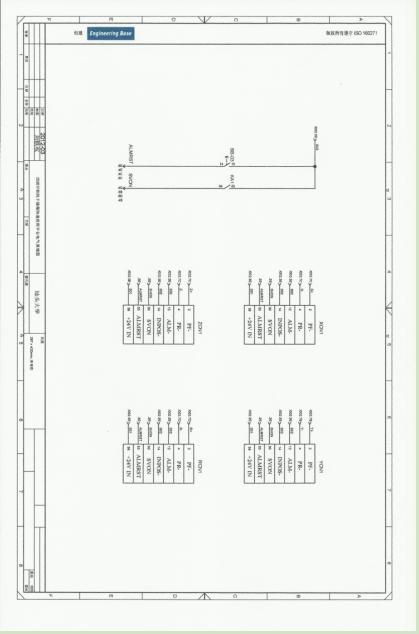
���(xi��ng)Ŀ�����\(y��n)��(d��ng)���ƿ�����ƺ��ģ�����~�˱˶�LS�ŷ��(q��)��(d��ng)ϵ�y(t��ng)�������O(sh��)Ӌ(j��)���˰���ӡˢ�C(j��)��������ٙz�y(c��)ƽ�_(t��i)����ϵ�y(t��ng)��늚�ԭ��D��
���������Դ
�����O(sh��)Ӌ(j��)�У��~�˱˶�LS�ŷ��(q��)��(d��ng)ϵ�y(t��ng)��������220V�Դ����(du��)�������͉�늚�Ԫ������ͨ�^(gu��)�_(k��i)�P(gu��n)�Դ�D(zhu��n)����ֱ��24V��(du��)�乩늡���ˣ�ϵ�y(t��ng)�O(sh��)��һ��(g��)���_(k��i)�P(gu��n)������ϵ�y(t��ng)�Ŀ��Դ�����ڇ�(gu��)��(n��i)����늉���380V�����Դ�������Ҫ��һ��(g��)����׃������늉��D(zhu��n)�Q������220V����늣��ٷ��O(sh��)һ��(g��)�����Դ�����_(k��i)�P(gu��n)�cһ��(g��)ֱ���Դ�����_(k��i)�P(gu��n)�������Դ�������һ��(g��)���]���o��һ��(g��)���_(k��i)���o�ͽ������|���M�ϣ��ɷ���Č�(sh��)�F(xi��n)�·��ͨ�࣬�_(k��i)�P(gu��n)�ĘO��(sh��)��(du��)��(y��ng)���ŷ�����Ҫ��
�����\(y��n)��(d��ng)���ƿ�늚�ӿ��O(sh��)Ӌ(j��)
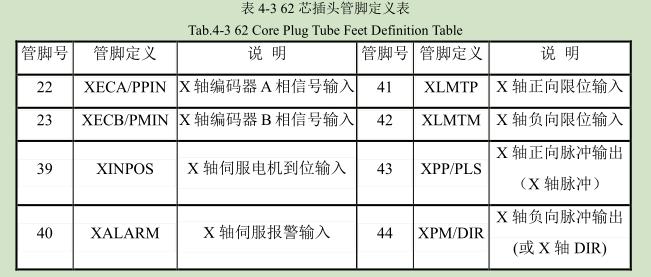
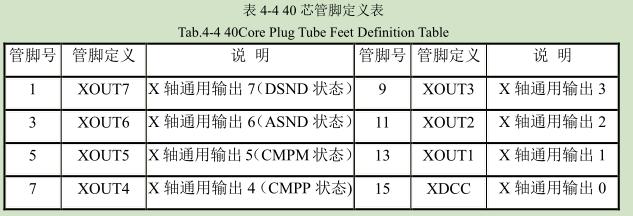
����(j��)�(xi��ng)Ŀ���\(y��n)��(d��ng)���ƿ��Ŀ��ƹ��ܣ���(du��)�\(y��n)��(d��ng)���ƿ��c���ŷ�늚�ӿ��Լ��\(y��n)��(d��ng)���ƿ��c���ŷ��(q��)��(d��ng)�}�_��ݔ��ӿ��M(j��n)�����O(sh��)Ӌ(j��)�����x�ð���̩USB1020�\(y��n)��(d��ng)���ƿ��ڹ����^(gu��)���У��Y(ji��)����ͨ��ݔ�롢ݔ�����ԣ��Լ����(xi��ng)Ŀ�đ�(y��ng)�����c(di��n)��(du��)�\(y��n)��(d��ng)���ƿ�62о���^��40оD�Ͳ��^���_�M(j��n)���˶��x����X�S�����M(j��n)�����O(sh��)�ã�Y��Z��R�S���O(sh��)��ͬX�S��X�S���_���x���w�O(sh��)�����±���ʾ��
�ġ��ŷ�늚�ӿ��O(sh��)Ӌ(j��)
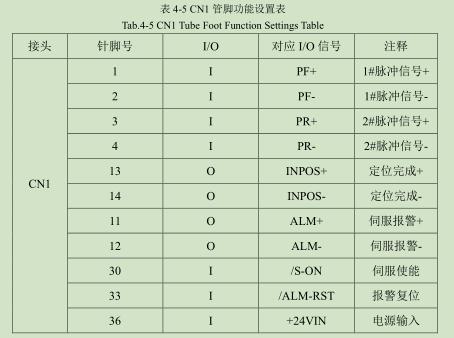
�y(c��)ԇƽ�_(t��i)�O(sh��)Ӌ(j��)��ʹ���ŷ�ϵ�y(t��ng)��(l��i)��(sh��)�F(xi��n)��(zh��n)�_��λ������ŷ�ϵ�y(t��ng)����λ�ÿ���ģʽ�ĽӾ��������ڴ�ģʽ���~�˱˶�LS�ŷ����O(sh��)������(g��)�ⲿ�ӿڣ�����CN1���T�����ϼ�(j��)������̖(h��o)��ݔ�뼰ݔ����CN2���ھ��a����̖(h��o)��ݔ�룻CN3�����c�ϼ�(j��)ͨ�řC(j��)�M(j��n)��ͨ�š�CN1�˿��O(sh��)���}�_��ݔ�롢�}�_�����̖(h��o)����λ��ɡ��ŷ��_(k��i)�����ŷ���(b��o)���ȣ��Á�(l��i)�����ŷ�ϵ�y(t��ng)���\(y��n)��(d��ng)���ŷ��(q��)��(d��ng)ʹ���ⲿֱ��24V�Դ�����ŷ�����(sh��)PE-601�O(sh��)�Þ�2��ʹ���ŷ�ϵ�y(t��ng)�M(j��n)��λ��ģʽ�M(j��n)�ж�λ�\(y��n)�D(zhu��n)��ͬ�r(sh��)����(y��ng)��_���ܵ��O(sh��)�����±���ʾ��
�塢�ŷ�ϵ�y(t��ng)�ą���(sh��)�O(sh��)��
��(du��)�ŷ�ϵ�y(t��ng)�ĽӾ�ԭ�������ƹ����˽��λ����߀���ܺܺñ��C����Ҫ��(du��)�ŷ�����(sh��)�M(j��n)���O(sh��)���Ԍ�(sh��)�F(xi��n)�(q��)��(d��ng)�c늙C(j��)���õĶ�λƥ�䡣��X�S�ŷ��������w����(sh��)�O(sh��)�����±�4-6��
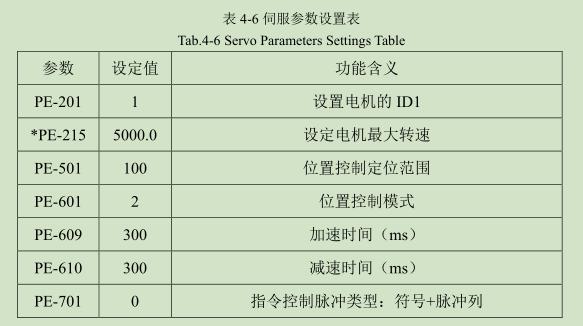
����(sh��)�O(sh��)���f(shu��)����
��1�����ڜy(c��)ԇƽ�_(t��i)�Ƕ�늙C(j��)����ģʽ���O(sh��)��늙C(j��)��ID�Ǟ����ܺܺõČ�(du��)��늙C(j��)�M(j��n)��ָ���}�_���ơ����O(sh��)X늙C(j��)��1̖(h��o)늙C(j��)�M(j��n)�Ѕ���(sh��)�O(sh��)��ʾ����
��2�����˷�ֹ늙C(j��)�ڜy(c��)ԇ�^(gu��)�����D(zhu��n)�ٳ��^(gu��)�O(sh��)��ֵ̫�࣬����ͨ�^(gu��)�˅���(sh��)��(l��i)�O(sh��)����
��3����λ�������Á�(l��i)�O(sh��)��ݔ����λ�ꮅ��̖(h��o)�ķ�����ƫ��Ӌ(j��)��(sh��)���М������}�_��(sh��)��С�ڶ�λ�ꮅ�����O(sh��)��ֵ���tINP-SG����(d��o)ͨ���˕r(sh��)ݔ����λ�����̖(h��o)������λ�������O(sh��)�����^�����ŷ�ϵ�y(t��ng)�\(y��n)���ٶ��^�ͣ��˕r(sh��)����һֱ̎�ڌ�(d��o)ͨ�Ġ�B(t��i)������ʹϵ�y(t��ng)�����O(sh��)Ӌ(j��)�ĕr(sh��)��D������ͬ�r(sh��)���C�\(y��n)�еĿɿ������O(sh��)����λ����PE-501��ֵ�������O(sh��)�Þ�100��
��4��ƽ�_(t��i)��Ҫ�nj�(sh��)�F(xi��n)��(zh��n)�_��λ�ģ��ʰ�PE-601�ŷ�ϵ�y(t��ng)�O(sh��)�Þ�λ�ÿ���ģʽ��
��5��ͨ�^(gu��)�Ӝp�ٕr(sh��)�g�O(sh��)�����Կ���ƽ�_(t��i)�\(y��n)���еķ�(w��n)���ԡ�
��6���÷�̖(h��o)���}�_����ʽ��(l��i)�����ŷ�늙C(j��)�������D(zhu��n)�����\(y��n)��(d��ng)���ƿ������}�_ݔ���ں�PP�B�Ӂ�(l��i)�����ŷ�늙C(j��)���D(zhu��n)�ٺ��D(zhu��n)��(d��ng)�Ƕȣ�ͨ�^(gu��)����NP�˿ڵ��ƽ��(l��i)��늙C(j��)�D(zhu��n)��(d��ng)�ķ���
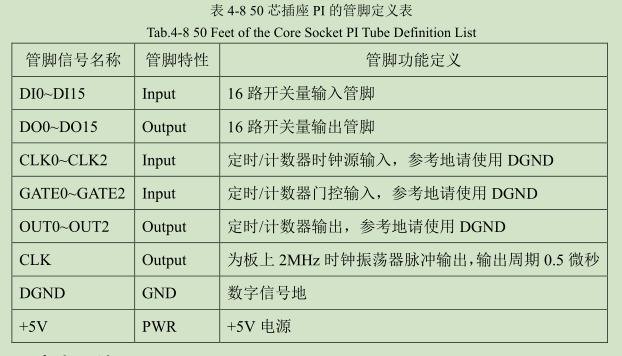
������(sh��)��(j��)�ɼ����ӿ��O(sh��)Ӌ(j��)
��(sh��)��(j��)�ɼ���USB2817��16��ͨ������8�pͨ���Ĕ�(sh��)��(j��)�ɼ��������n�}�(xi��ng)Ŀ���L(f��ng)�ء��L(f��ng)��ģ�M��̖(h��o)ֻ��Ҫռ�Ãɂ�(g��)ģ�M��ݔ��ͨ�������˱��ڽӾ������m(x��)�U(ku��)չ����(du��)37оD�Ͳ���CN1�Ĺ��_��50о����PI�Ĺ��_���w���x���±�4-7��4-8��http://www.jggj69.com

 �����W(w��ng)���� 44190002002768̖(h��o)
�����W(w��ng)���� 44190002002768̖(h��o)